

Robotics, AI & ML
Remote Handling & Robotics Technology
 Successfully Established of 3 sided fully immersive Cave Automatic Virtual Environment (CAVE) VR facility at IPRIn-Vessel Inspection (IVIS) System is First UHV compatible 06 DOF articulated arm in India.A VR based control system for monitoring and controlling articulated robotic inspection arm (50 kg payload at 2.2m reach) has been developed and tested successfully.
Successfully Established of 3 sided fully immersive Cave Automatic Virtual Environment (CAVE) VR facility at IPRIn-Vessel Inspection (IVIS) System is First UHV compatible 06 DOF articulated arm in India.A VR based control system for monitoring and controlling articulated robotic inspection arm (50 kg payload at 2.2m reach) has been developed and tested successfully.In addition to the domestic developments, IPR as part of international collaboration has completed and delivered remote handling task agreements with ITER-IO, France and JET, UK
Artificial Intelligence Software for Fast Automated Screening of Chest Ailments (such as TB) using Chest X- Ray Images, in collaboration with ICMR headquarters, Delhi. -https://tb.ai.icmr.org.in/ai4tb/
Artificial Intelligence (AI) Software for Fast Automated Screening of TB (Sputum)AI with EEG signals for prediction of seizures, in collaboration with AIIMS Delhi. Automated and online Human detection in CCTV images.Use of image processing and AI in automation of experiments at IPR and external agencies. Other potential areas of AI application like hand movement, gesture recognition, big data analysis are part of other collaborations. DeepCXR
Institute of Plasma Research developed AI tool for detection of TB and other lung disease using Chest X-ray, was tested on limited data set and therefore the entire range of variables have not been covered.
MOU signed & training of tool initiated on the data of culture confirmed X-rays from previous surveys which includes data from four zones of India.
At present tools are in advanced stage of testing with numerous images from various sources. This work is being carried out in collaboration with Civil Hospital, Ahmedabad, ICMR, head quarter Delhi, NIRT, Chennai and other participating institutes/medical colleges in India. The software has the capability of processing more than 250 images in 30 mins.
A central website has been developed at ICMR Delhi https://tb.ai.icmr.org.in/ai4tb/
A pre processing software was developed by IPR and training was given to all participant institutes .
For our software DeepCXR we need digital CXR(chest x-ray). For this purpose a prototype of digitizer of chest X-rays was developed and tested.

AIBacilli
This is another AI software developed at IPR for automated detection of single/multiple mycobacillus in sputum smear test. This AI based Software uses AI based technique of Object Detection. Software development together with the relevent Hardware automation is being carried out to simplify the current practice. The work is being carried out in collaboration with Civil Hospital, Ahmedabad.
The softwares are capable of running on CPU/GPU/ARM devices.

AI tools on the top of existing security systems are designed, developed and deployed for 24 x 7 monitoring of critical areas/lab spaces etc. GUI interface, data storage, network connectivity forms the part of the system. We have trained,tested and validated a CNN model which determines the object of interest (human) in live CCTV frames.
Blockchain technology for data sharing/authentication/Validation
Blockchain Technology: Web 3.0 based advanced encryption technologies are integrated with current software to leverage the benefits of decentralization. The software is designed to interact with public blockchain nodes, stores the encrypted values in block of defined pre-defined contract to be retrieved at later date. The software has numerous applications like govt data repository, certificates, digital health records etc.
Recent Publications
1 A. Abhishek et al, Real Time Close Circuit Television: Artificial Intelligence Monitoring Solution, Technical Report-617, Feb 2021
2 A. Abhishek et al System and Method for Screening Chest X-Ray Image for Diagnosis, – Indian Patent App. No. 201921016615
3 Manika Sharma, H. Hemani et al , Towards finding Vocal signatures of Covid-19 in cough Sounds –IPR/RR-1253/2021
4 SC A Vaid et al., Emerging Advanced Technologies Developed by IPR for Bio Medical Applications - A Review, Neurol India 68 (1), 26-34, 2020
Conference presentations :
An Artificial Intelligence based Solution for SST1 Tokamak building monitoring, Agraj Abhishek et al, Poster presented in PSSI 2021
Image processing and its application in Tokamak
Introduction Visible image acquisition is one of the activities during Plasma experiments to diagnose Tokamak Plasma. Due to the presence of strong magnetic fields in and around Tokamak, the camera cannot be directly kept inside the Tokamak. For imaging purpose where camera can’t be used directly, optical fiber bundle is used with camera to capture image. The image captured using optical fibre bundle has some noise, which is referred as Honeycomb structure. Software package developed for removal of honeycomb structure. The executable software package is capable to read from USB/IP camera or from stored video file.
A prototype for image processing based feedback as required for experimental setups is also being developed and tested.
 Fig: Image captured using wound image bundle (noise can be seen in black stripes referred as honeycomb structure )
|  Fig:Digitally processed to provide clear image
|
Image processing of plasma images for boundary extraction (from SST-1 imaging diagnostic)
Digitally processed to provide clear image with plasma boundary extraction
captured using wound image bundle (noise can be seen in black stripes referred as honeycomb structure )
Remote Handling & Robotics Technology
 IPR Virtual Reality Facility
|  IVIS SYSTEM
|
Remote Handling is often described as the synergistic combination of technology and engineering management systems to enable operators to safely, reliably and repeatedly perform manipulation of items without being in personal contact.
The scope of this project is to build a versatile Remote Handling System for challenging environments. The major objectives are design and development of dexterous articulated robotic arms, dual arm manipulators, hyper redundant inspection systems, haptic arms, mobile robots etc. capable to carry out inspection and maintenance activities in challenging environments such as presence of ultra high vacuum, high temperature, narrow spaces, magnetic fields, etc.
The developments also include establishment of advanced Virtual Reality (VR) CAVE facility and development of interactive VR applications catering to operator training, kinematic testing, assembly & maintenance, interface studies, safety management, operation sequences, monitoring and control of RH operations.
The development of the technologies and systems are being carried out in a parallel and interrelated mode with support of external agencies and institutions.
Recent developments:
1. Fully Immersive Virtual Reality (VR) CAVE Facility - AABHAS
 A 3 sided fully immersive Cave Automatic Virtual Environment (CAVE) VR facility has been successfully establishment at IPR.Remote operations require the accurate perception of a dynamic environment. The aim of this facility is to give the operators the same unrestricted knowledge of the task scene as would be available if they were physically located in the remote environment. The facility comprises of 3 Sided display screens with projection systems, 6 DOF optical hand/head tracking system, haptic force feedback arm for interactions, 3D middleware application etc. The facility is extremely useful in creating 3D virtual walkthroughs of machines, accurate virtual prototyping eliminating the need for physical prototypes, system interface & integration studies, real-time monitoring and control of RH operations and customized operator training by developing simulated scenarios using CAD & simulation software.The VR facility is seamlessly compatible with various design and modelling software like CATIA V5, Solidworks, 3D via composer etc. The users can load the 3D models of the machines/systems in the VR facility and it can be instantly viewed as 3D immersive models using the stereoscopic glasses and feel as if they are actually present in the virtual environment. Various features are available to users like virtual assembly, collision detection, snapshots, video animations, zoom in/out, fly through, and clipping planes etc.With integrated haptic arm, the users can feel the collisions and forces while carrying out virtual assembly task or while performing master slave robotic operations
A 3 sided fully immersive Cave Automatic Virtual Environment (CAVE) VR facility has been successfully establishment at IPR.Remote operations require the accurate perception of a dynamic environment. The aim of this facility is to give the operators the same unrestricted knowledge of the task scene as would be available if they were physically located in the remote environment. The facility comprises of 3 Sided display screens with projection systems, 6 DOF optical hand/head tracking system, haptic force feedback arm for interactions, 3D middleware application etc. The facility is extremely useful in creating 3D virtual walkthroughs of machines, accurate virtual prototyping eliminating the need for physical prototypes, system interface & integration studies, real-time monitoring and control of RH operations and customized operator training by developing simulated scenarios using CAD & simulation software.The VR facility is seamlessly compatible with various design and modelling software like CATIA V5, Solidworks, 3D via composer etc. The users can load the 3D models of the machines/systems in the VR facility and it can be instantly viewed as 3D immersive models using the stereoscopic glasses and feel as if they are actually present in the virtual environment. Various features are available to users like virtual assembly, collision detection, snapshots, video animations, zoom in/out, fly through, and clipping planes etc.With integrated haptic arm, the users can feel the collisions and forces while carrying out virtual assembly task or while performing master slave robotic operations2. UHV compatible articulated In-Vessel Inspection System (IVIS)
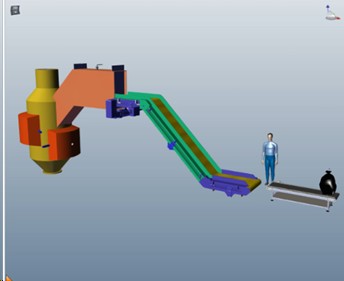
Plasma facing components (PFCs) in a tokamak are subjected to high heat & particle fluxes, which damages them over time. Hence, the periodic inspection is essential for health monitoring of PFCs in between plasma experiments, and this must be done without breaking the ultra-high vacuum.An In-Vessel Inspection System(IVIS) has been developed at IPR to perform the remote in-service inspection inside toroidal vacuum vessel (VV). The IVIS is compatible to 1e-7 mbar vacuum and 100°C temperature.The IVIS consists of a 6-DOF articulated arm with reach up to 4m, mounted on a linear guide and a vacuum storage chamber (VSC). The IVIS system is controlled remotely using virtual reality based monitoring and control. During initial testing, position repeatability of ±2mm has been achieved. IVIS system can also be adapted for inspection & maintenance in any large systems with challenging environment like vacuum, temperature, narrow spaces etc.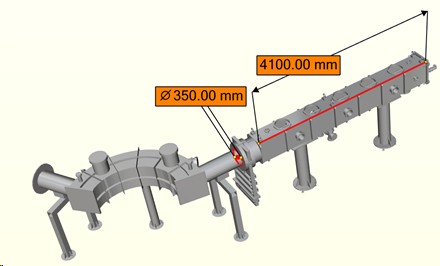 IVIS System with a toroidal chamber
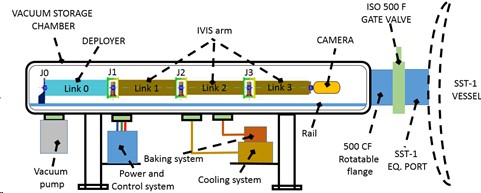 Overall systematic of IVIS System
|
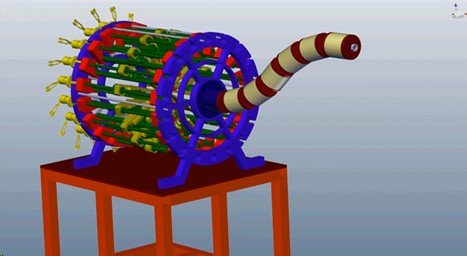
3. Hyper Redundant Inspection System (HyRIS)
Hyper-redundant manipulators are an alternative to serial manipulators that can be used for inspection and maintenance in constrained location. It is a cable driven long reach arm, having dexterity similar to an elephant trunk deployable in narrow spaces, challenging environments. They are highly suitable for inspections in tokamak environment, where the robotic systems need to have multiple degrees of freedom, light weight, fast deployment and retrieval mechanism and high dexterity.In conventional robots, each link moves in a 2D plane that is normal to its actuation axis that is controlled by a motor-gearbox assembly. Thus the number of DOFs for a conventional robot is defined by the number of joints. Hyper-redundant robots, on the other hand, have joints that are defined by a spherical workspace – similar to a ball bearing, and the actuation is controlled using cables or cables. As a result, each joint is not restricted to a 2D plane and can actuate the in a 3D workspace. IPR has designed and developed a 15 DOF HyRIS system that can be used for inspection applications the challenging environment. The system has been successfully tested.4. Indigenous development of Haptic master arm for tele-manipulation
To execute dynamic RH tasks safely, a ‘man-in-loop’ architecture is typically followed. A haptic master arm with force feedback in all 6 DOFs is being developed for operator level controlling of the robotic manipulators. It is a 6 axis master arm comprises of back drivable actuators and associated control system to generate proportional forces/ torques on the operator’s hands as experienced by the slave robot joints.The system is extremely useful to minimize the time for planning the operation sequences and testing in a mock up facility. This system can also be used for the training of the operators and for demonstration of the operations during mock up trials.The operator can interact and drive the robot using a mechanical handle with a coupling of the forces between the operator and the slave arm. As the system is sensitive to the external forces, it achieves higher level of safety and there is a reduced risk to damage the interfacing components. The initial test results show high precision and accuracy with a low latency.  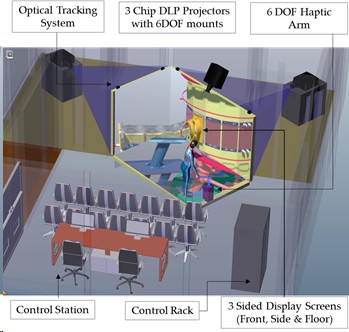 IPR Virtual Reality Facility
|
 IVIS SYSTEM DEMO
|
 VR application for Operator Training
|
 Schematic of the 6 Joints Hyper redundant inspection system
|
 VR based demonstration of automated waste handling in pyrolysis system
|
 Dual Arm Manipulator
|
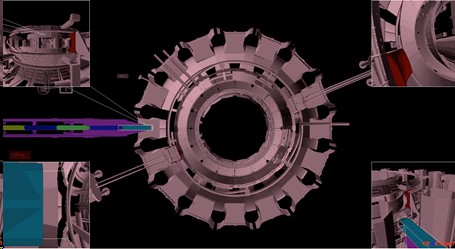 IVIS Deployment in SST-1
|
Achievements
1) Successfully Established of 3 sided fully immersive Cave Automatic Virtual Environment (CAVE) VR facility at IPR
2) In-Vessel Inspection (IVIS) System is First UHV compatible 06 DOF articulated arm in India.
3) A VR based control system for monitoring and controlling articulated robotic inspection arm (50 kg payload at 2.2m reach) has been developed and tested successfully
In addition to the domestic developments, IPR as part of international collaboration has completed and delivered remote handling task agreements with ITER-IO, France and JET, UK
Recent Publications
Naveen Rastogi, Amit Kumar Srivastava “Control System Design for Tokamak Remote Maintenance Operations Using Assisted Virtual Reality & Haptic Feedback”, published in Fusion Engineering & Design Journal (FED) by ELSEVIER. (Volume 139, February 2019, Pages 47-54) [https://doi.org/10.1016/j.fusengdes.2018.12.094]P. Dutta, N. Rastogi, K.K. Gotewal, “VIRTUAL REALITY APPLICATIONS IN REMOTE HANDLING DEVELOPMENT FOR TOKAMAKS IN INDIA”, Fusion Eng. Des. 118 (2017) 73–80. doi: 10.1016/j.fusengdes.2017.03.047. N. Rastogi, A. K. Srivastava, P. Dutta and K. K. Gotewal, "Virtual reality based monitoring and control system for articulated in-vessel inspection arm," 2017 IEEE International Conference on Power, Control, Signals and Instrumentation Engineering (ICPCSI), Chennai, 2017, pp. 1728-1731. doi: 10.1109/ICPCSI.2017.8392009 N. Rastogi, P. Dutta, V. Krishna, K.K. Gotewal, "Implementation of an OROCOS based Real-Time Equipment Controller for Remote Maintenance of Tokamaks" in: Proc. Adv. Robot, ACM Press, New York, New York, USA, 2017: pp.1-6 doi:10.1145/3132446.3134900P. Dutta, A. K. Srivastava, N. Rastogi and K. K. Gotewal, "Simulation Study on Tokamak Relevant Visual Servoing System," 2017 Ninth International Conference on Advanced Computing (ICoAC), Chennai, India, 2017, pp. 97-101. doi:10.1109/ICoAC.2017.8441417P. Dutta, K.K. Gotewal, N. Rastogi, R. Tiwari, Manoah Stephen "A Hyper-Redundant Robot Development for Tokamak Inspection” in: Proc. Adv. Robot, ACM Press, New York, New York, USA, 2017: pp. 1-6. doi:10.1145/3132446. 3134876Rastogi, V. Krishna, P. Dutta, M. Stephen, K. Kumar, D. Hamilton, J.K. Mukherjee “DEVELOPMENT OF A PROTOTYPE WORK-CELL FOR VALIDATION OF ITER REMOTE HANDLING CONTROL SYSTEM STANDARDS”, Fusion Eng. Des. (2016). doi:10.1016/j.fusengdes.2016.12.021.- Artificial Intelligence
- Image Processing
- Remote Handling & Robotics Technology